eFabless MPW で作成した Caravel SoCの事前評価
Marmot 温度センサーデモ
バージョン: 2025/02/25
目次:
目的。
MarmotがサポートしているI2C, GPIO, SPI の動作の確認(今回、SPIは除外
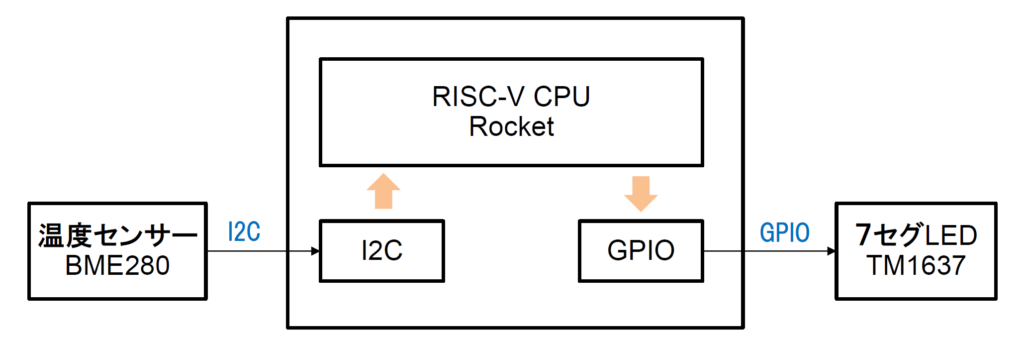
処理内容
構成
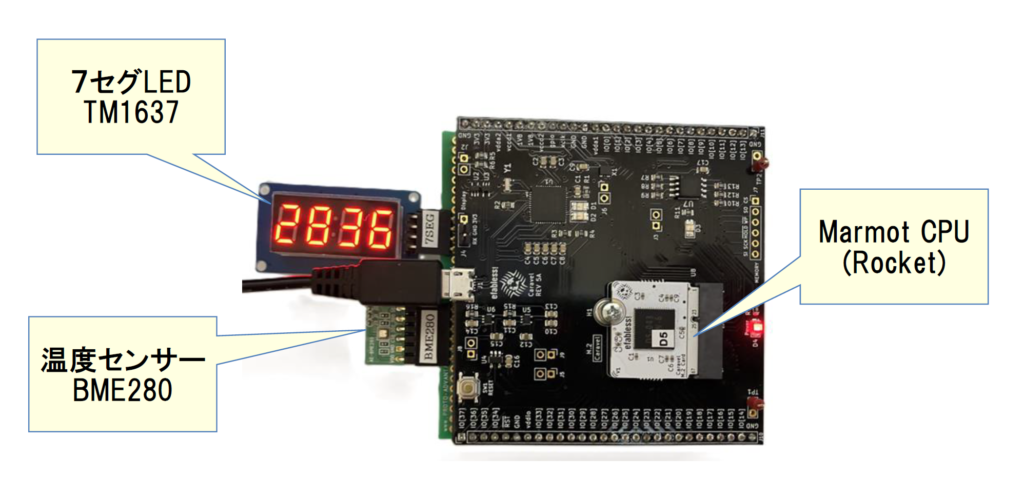
実際のデモの様子
Marmot の I2Cコントローラの仕様
I2C 初期化
I2C0_REG(OC_I2C_PRER_LO) = 0x0f;
I2C0_REG(OC_I2C_PRER_HI) = 0x0;
I2C0_REG(OC_I2C_CTR) = OC_I2C_EN;
ピンクの線: プリスケーラーの設定
黄色の線: I2Cのイネーブル
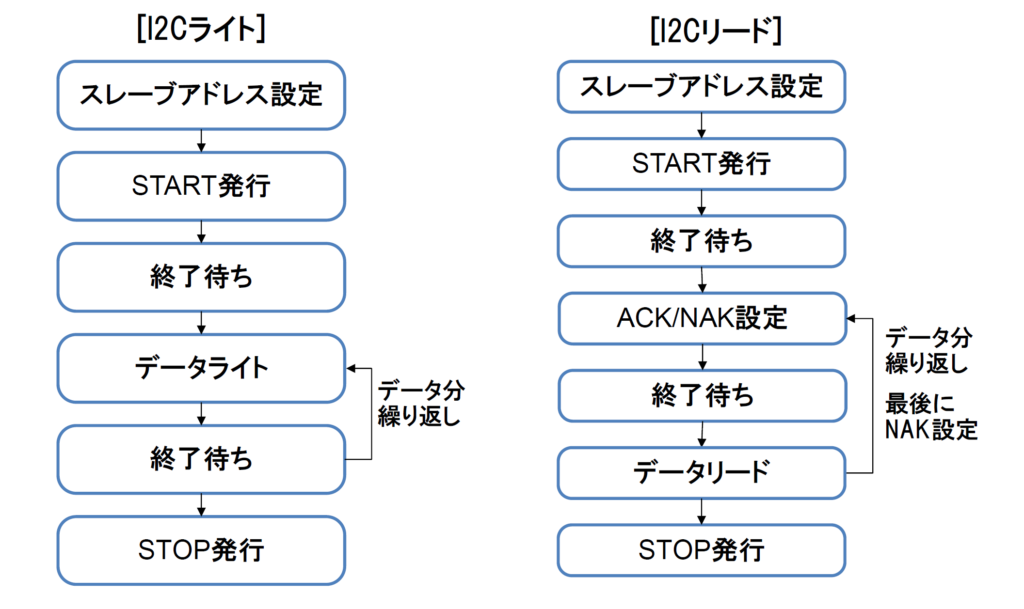
Marmot の I2Cライト・リード
BME280の特徴
資料
| 資料 | 場所 |
|---|---|
| ドキュメント | https://www.bosch-sensortec.com/products/environmental-sensors/humidity-sensors-bme280 |
| サンプルコード | https://github.com/boschsensortec/BME280_SensorAPI |
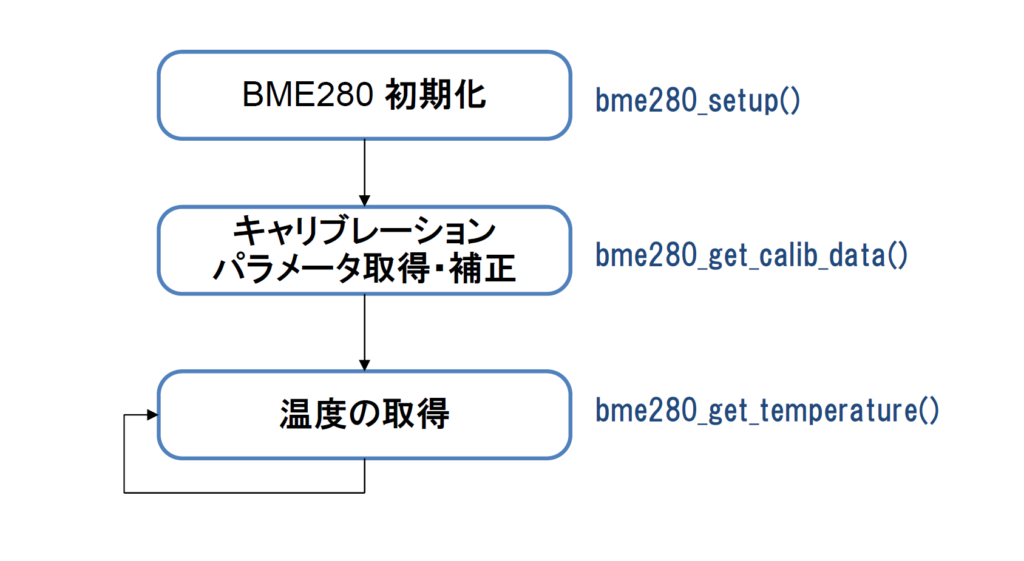
ソース実装の方針
BME280の制御フロー
GPIOの仕様は、Freedom FE310 Manual
Chapter 10 Figure 10で確認
資料:以下に英語版が存在
https://github.com/revolunet/tm1637/blob/master/datasheet-en.pdf
特徴
=> I2Cのようなオープンドレイン制御を想定?
Linuxでのgpio-i2c ドライバのような制御を行う
GPIO に OE制御と出力データ設定のインタフェースを設定
Low 出力
High 出力
このテストでは、以下の条件で実施しました:
reg_mprj_io_13 = GPIO_MODE_USER_STD_BIDIRECTIONAL; // IO3
reg_mprj_io_12 = GPIO_MODE_USER_STD_BIDIRECTIONAL; // IO2
reg_mprj_io_11 = GPIO_MODE_USER_STD_BIDIRECTIONAL; // IO1
reg_mprj_io_10 = GPIO_MODE_USER_STD_BIDIRECTIONAL; // IO0SPIフラッシュ命令フォーマットレジスタ(ffmt)
| ビット | フィールド名 | 属性 | 初期値 | 説明 |
|---|---|---|---|---|
| 0 | cmd_en | RW | 0x1 | コマンド送信を有効化 |
| [3:1] | addr_len | RW | 0x3 | アドレスバイト数(0~4) |
| [7:4] | pad_cnt | RW | 0x0 | ダミーサイクル数 |
| [9:8] | cmd_proto | RW | 0x0 | コマンド送信時のプロトコル |
| [11:10] | addr_proto | RW | 0x0 | アドレスおよびパディング送信時のプロトコル |
| [13:12] | data_proto | RW | 0x0 | データ受信時のプロトコル |
| [15:14] | Reserved | |||
| [23:16] | cmd_code | RW | 0x3 | コマンドバイトの値 |
| [31:24] | pad_code | RW | 0x0 | ダミーサイクル中に送信する最初の8ビット |
例えば、以下のコードは SPI フラッシュの命令フォーマットレジスタを QPI モードで Fast Read を使用するように設定します。
// Set XIP access to Quad mode
dummy = SPI_INSN_CMD_EN
| SPI_INSN_ADDR_LEN(0x3)
| SPI_INSN_PAD_CNT(0x2)
| SPI_INSN_CMD_PROTO(SPI_PROTO_Q)
| SPI_INSN_ADDR_PROTO(SPI_PROTO_Q)
| SPI_INSN_DATA_PROTO(SPI_PROTO_Q)
| SPI_INSN_CMD_CODE(0x0b) // Fast read
| SPI_INSN_PAD_CODE(0x00);
while (_REG32(spi_base_addr, SPI_REG_RFMT) != dummy) {
_REG32(spi_base_addr, SPI_REG_RFMT) = dummy;
}
// Set SPI Flash to Quad mode
while (_REG32(spi_base_addr, SPI_REG_TXFIFO) & SPI_TXFIFO_FULL); // Wait until TX FIFO not full
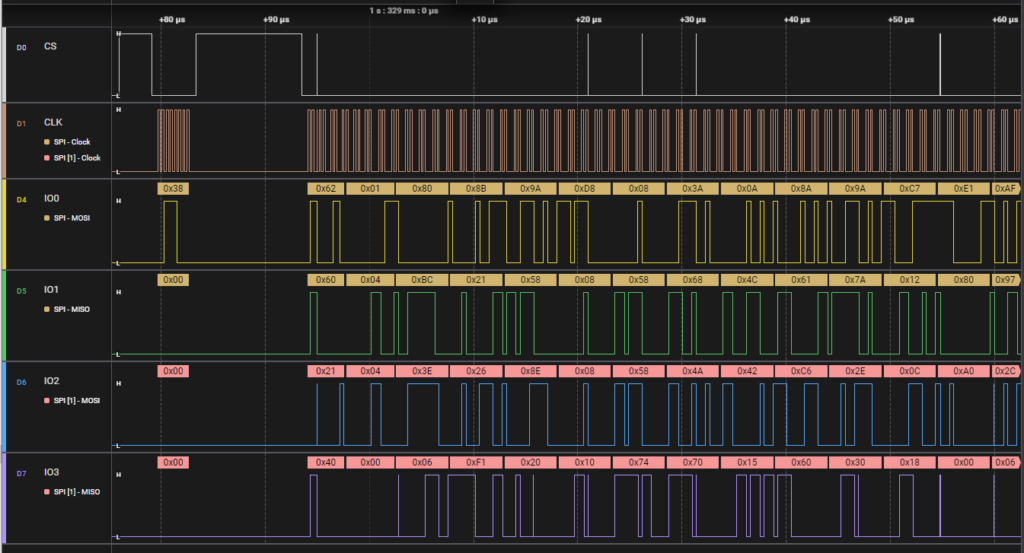
_REG32(spi_base_addr, SPI_REG_TXFIFO) = CMD_ENTER_QUAD_MODE; // 0x38注意: この関数はQSPIフラッシュではなく、ITIM(Instruction Tightly Integrated Memory)上で実行する必要がある。
__attribute__ ((section (".text_itim"))) void init_spi(uint32_t spi_base_addr)
{
volatile uint32_t dummy;
asm volatile ("fence\n\t"
"fence.i");
// Set SPI clock
while (_REG32(spi_base_addr, SPI_REG_SCKDIV) != SCKDIV) {
_REG32(spi_base_addr, SPI_REG_SCKDIV) = SCKDIV;
}
// Disable XIP mode
while (_REG32(spi_base_addr, SPI_REG_RCTRL) != 0x0) {
_REG32(spi_base_addr, SPI_REG_RCTRL) = 0x0;
}
// Set SPI Flash to Quad mode
while (_REG32(spi_base_addr, SPI_REG_TXFIFO) & SPI_TXFIFO_FULL); // Wait until TX FIFO not full
_REG32(spi_base_addr, SPI_REG_TXFIFO) = CMD_ENTER_QUAD_MODE;
// Set XIP access to Quad mode
dummy = SPI_INSN_CMD_EN
| SPI_INSN_ADDR_LEN(0x3)
| SPI_INSN_PAD_CNT(0x2)
| SPI_INSN_CMD_PROTO(SPI_PROTO_Q)
| SPI_INSN_ADDR_PROTO(SPI_PROTO_Q)
| SPI_INSN_DATA_PROTO(SPI_PROTO_Q)
| SPI_INSN_CMD_CODE(0x0b) // Fast read
| SPI_INSN_PAD_CODE(0x00);
while (_REG32(spi_base_addr, SPI_REG_RFMT) != dummy) {
_REG32(spi_base_addr, SPI_REG_RFMT) = dummy;
}
// Enable XIP mode
while (_REG32(spi_base_addr, SPI_REG_RCTRL) != SPI_FCTRL_EN) {
_REG32(spi_base_addr, SPI_REG_RCTRL) = SPI_FCTRL_EN;
}
}
以下は、QSPI フラッシュを QPI モードで動作させた結果です。
Copyright © Japan Embedded Systems Technology Association All Rights Reserved.